2WD⇄4WDをドライバーが操作して切り替えるシステム
シンプルなシステムで、基本的に悪路の時のみ4WDを選択するトラックやクロカン車に多く採用されています。
*パートタイム=切り分け
センターデフを追加することで常時4WDにするシステム
フルタイム4WDで走れるようにしたシステム。
燃費を気にしないハイパワー車や大型車などに多く採用されています。
タイヤがスリップして初めて4WDに切り替わるシステム
シンプルで低コストなシステム。軽自動車やコンパクトカー、ミニバンに多く採用されています。
*オンデマンド=必要に応じて
2WD~4WDをコンピューター(電子制御)で 自在にコントロールするシステム
中型車やSUVなど幅広い車種に採用されています。
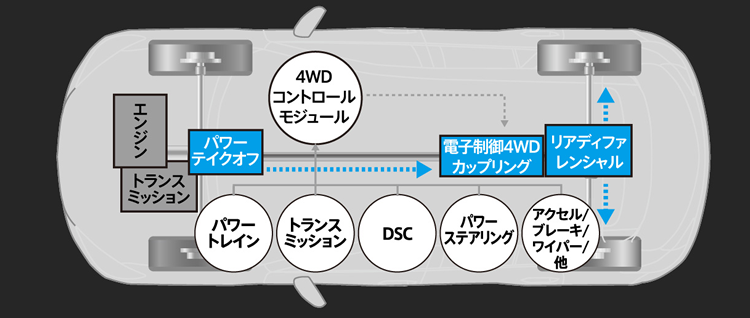
 マツダが採用している
マツダが採用している■ 状況に合わせて最適な駆動力を発揮!
■ エンジン/ブレーキ制御とも協調し、 さらに高度な車両制御が可能!


前後輪のトルク配分を自動制御。ドライバーが気づかないレベルのごくわずかな
タイヤの動きや路面状況などをリアルタイムにモニターし、
前後輪のエンジントルク配分を2WD(FF)相当から直結4WD状態まで積極的にコントロール。
優れた走破力と操縦安定性をもたらし、悪路でも効率のよい走りを実現します。

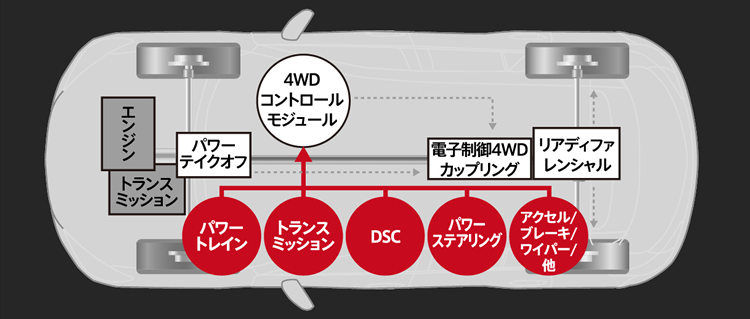
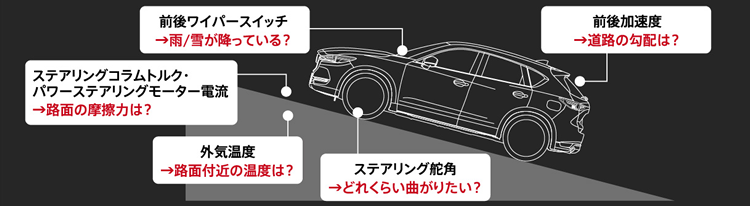
多数のセンサーモジュールによって検知したドライバーの走行意図と路面状況を解析し、前輪のスリップ予兆を打ち消すために必要な後輪トルク量を、4WDコントロールモジュールが瞬時に演算。ほぼ同時に適切な駆動力を後輪に伝達するよう、4WDカップリングに指令を送ります。
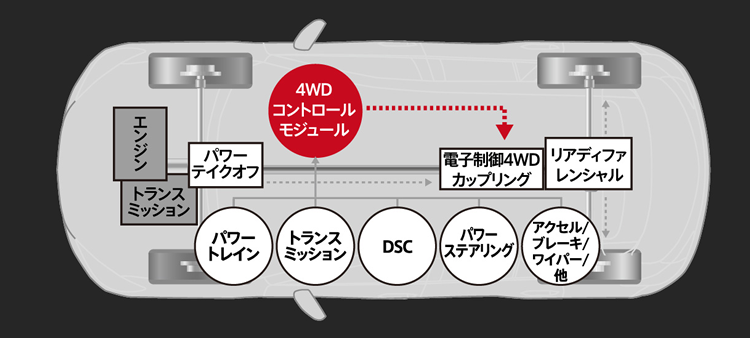
指令にもとづいた駆動力を後輪に伝達。前後・左右方向に車輪をスリップさせることなく、安定した発進・加速・旋回・制動を実現します。また、スリップしにくい乾いた路面では、不要な後輪トルクの伝達を抑え、ほぼ2WD状態で走行。優れた燃費に貢献します。